El intento de conocer con anticipación, conforme a ciertas hipótesis, las previsiones cuantitativas y cualitativas sobre la demanda de tráfico y sus características, se conoce como prognosis o prospectiva.
La prognosis puede realizarse mediante un sistemático examen de los factores que condicionan la movilidad urbana y los datos estadísticos de la misma, y por otro lado, mediante técnicas de computación que permiten el tratamiento de la información obtenida en la propia orden y el manejo de una amplia gama de variedades del problema. Sin embargo, dado que no se puede realizar una ciudad modelo que se adapte a cada una de las realidades, al existir factores de difícil cuantificación, tanto de tipo tecnológico como sociológico, la prospectiva del estudio no debería ser superior a dos o tres décadas.
La prospectiva en España, tiene la dudosa ventaja, de poder establecer analogías con sociedades más avanzadas e industrializadas europeas, estableciendo un paralelismo en nuestro desarrollo futuro, al haber un cierto desfase entre los modelos económicos y de transporte europeos, y el español.
En ambos conceptos, de todas formas, existe un cierto riesgo, que se intentará minimizar al construir la base del planteamiento e intentar un margen de flexibilidad para adaptar el estudio a factores no previstos en el inicio del mismo.
La prognosis puede realizarse mediante un sistemático examen de los factores que condicionan la movilidad urbana y los datos estadísticos de la misma, y por otro lado, mediante técnicas de computación que permiten el tratamiento de la información obtenida en la propia orden y el manejo de una amplia gama de variedades del problema. Sin embargo, dado que no se puede realizar una ciudad modelo que se adapte a cada una de las realidades, al existir factores de difícil cuantificación, tanto de tipo tecnológico como sociológico, la prospectiva del estudio no debería ser superior a dos o tres décadas.
La prospectiva en España, tiene la dudosa ventaja, de poder establecer analogías con sociedades más avanzadas e industrializadas europeas, estableciendo un paralelismo en nuestro desarrollo futuro, al haber un cierto desfase entre los modelos económicos y de transporte europeos, y el español.
En ambos conceptos, de todas formas, existe un cierto riesgo, que se intentará minimizar al construir la base del planteamiento e intentar un margen de flexibilidad para adaptar el estudio a factores no previstos en el inicio del mismo.
CENTRALIZACIÓN Y COMPUTACIÓN
Los Sistemas Centralizados para el Control del Tráfico Urbano, son una herramienta básica para la gestión mediante técnicas informáticas, de los elementos y equipos clásicos de regulación directa (instalaciones semafóricas).
Las aplicaciones primitivas de regulación por programas fijos han evolucionado, hacia estrategias cada vez más dinámicas, en su respuesta a las constantes alteraciones de las condiciones generales y sectoriales del tráfico.
Sin embargo, ante los importantes volúmenes de las demandas real y potencial, toda mejora introducida por el efecto positivo de aquellas estrategias, es rápidamente absorbida, apareciendo un fenómeno de realimentación, que tiende a perpetuar las concentraciones del tráfico en los principales itinerarios. Por lo tanto, más que una simple regulación en el sentido convencional, los sistemas centralizados tienden a la aplicación de estrategias que inciden en los itinerarios habituales, generando otros nuevos, y estableciendo una distribución más uniforme del tráfico, en el conjunto de la red urbana.
En ocasiones, es preciso restringir, en algún momento, la aportación de vehículos que alimentan zonas congestionadas o cercanas a la congestión, mediante un control de accesos a cruces, barrios o arterias determinadas. De esta forma se consigue aumentar la eficacia del sistema global, a partir de un mayor aprovechamiento de la capacidad viaria disponible, aún a costa de introducir tensiones parciales de dimensiones conocidas y aceptables.
Las aplicaciones primitivas de regulación por programas fijos han evolucionado, hacia estrategias cada vez más dinámicas, en su respuesta a las constantes alteraciones de las condiciones generales y sectoriales del tráfico.
Sin embargo, ante los importantes volúmenes de las demandas real y potencial, toda mejora introducida por el efecto positivo de aquellas estrategias, es rápidamente absorbida, apareciendo un fenómeno de realimentación, que tiende a perpetuar las concentraciones del tráfico en los principales itinerarios. Por lo tanto, más que una simple regulación en el sentido convencional, los sistemas centralizados tienden a la aplicación de estrategias que inciden en los itinerarios habituales, generando otros nuevos, y estableciendo una distribución más uniforme del tráfico, en el conjunto de la red urbana.
En ocasiones, es preciso restringir, en algún momento, la aportación de vehículos que alimentan zonas congestionadas o cercanas a la congestión, mediante un control de accesos a cruces, barrios o arterias determinadas. De esta forma se consigue aumentar la eficacia del sistema global, a partir de un mayor aprovechamiento de la capacidad viaria disponible, aún a costa de introducir tensiones parciales de dimensiones conocidas y aceptables.
Siempre que sea posible, es aconsejable que una instalación de semáforos esté regulada, al menos en cierta medida, por los propios elementos que regula. Un ejemplo claro, es aquella instalación obligada por el uso peatonal, cuando éstos pasen a intervalos irregulares en la jornada. Otro condicionante, para el uso de los semáforos mediante demanda, es que su eficacia ante: intensidades no previsibles; con un alto diferencial, entre la intensidad de la vía principal y las vías secundarias; intersecciones periféricas o bien, aquellas intersecciones a tiempos fijos que son puestas en intermitencia durante periodos del día.
|
Este tipo de actuaciones para la regulación y control centralizados, vienen condicionadas por una serie de elementos inalterables y limitaciones como son:
|
|
Hasta finales del siglo pasado, los principales sistemas de centralización, se basaban en un modelo humano, donde los computadores trabajan de modo indirecto como calculadores y almacenamiento de datos, pero sin interactuar directamente con el sistema de regulación urbana. Esto permitía que todo funcionamiento establecido la calle, había sido previamente calculado, lo que permite disponer de herramientas funcionalmente útiles antes de ser necesarias. Además, permite mejorar estas a medida que son utilizadas. Sin embargo, el número de posibilidades era siempre limitado, y la evolución de la informática a lo largo de los años, no era usada en todo su potencial.
Con la llegada del siglo XXI, los modelos de tipo adaptativo, donde los sistemas de programación ya no son modelos rígidos, sino que sólo obedecen a unas pautas determinadas, dando libertad a los sistemas informáticos, para que generen las programaciones de los semáforos dentro de las mismas, han variado sustancialmente los modos de trabajo en los Centros de Gestión de Tráfico. En estos momentos, no existen en la práctica, limitación en las posibilidades de funcionamiento de una intersección, siendo ésta determinada por la limitación de datos del propio viario y gestionado en tiempo real por el sistema informático. El sistema se adapta automáticamente a las variaciones de tráfico en acontecimientos especiales, anomalías o incidencias no programadas.
Cualquier modificación que afecta la capacidad del viario, de la malla o del área de trabajo, es rápidamente detectado, planificado y amortizado por el sistema.
Con la llegada del siglo XXI, los modelos de tipo adaptativo, donde los sistemas de programación ya no son modelos rígidos, sino que sólo obedecen a unas pautas determinadas, dando libertad a los sistemas informáticos, para que generen las programaciones de los semáforos dentro de las mismas, han variado sustancialmente los modos de trabajo en los Centros de Gestión de Tráfico. En estos momentos, no existen en la práctica, limitación en las posibilidades de funcionamiento de una intersección, siendo ésta determinada por la limitación de datos del propio viario y gestionado en tiempo real por el sistema informático. El sistema se adapta automáticamente a las variaciones de tráfico en acontecimientos especiales, anomalías o incidencias no programadas.
Cualquier modificación que afecta la capacidad del viario, de la malla o del área de trabajo, es rápidamente detectado, planificado y amortizado por el sistema.

Entre el amplio espectro de objetivos que fundamentan la implantación y desarrollo de sistemas centralizados, pueden citarse:
- Reducción del tiempo conjunto de los desplazamientos urbanos, aplicando algoritmos que optimizan las demoras y número de paradas.
- Conseguir un régimen más continuo en la circulación, combatiendo la polución y el ruido y creando áreas urbanas para uso exclusivo de peatones.
- Mejora de las condiciones que inciden sobre la Seguridad vial. Se considera, en este aspecto, fundamental y de muy alta rentabilidad, los efectos positivos que se consiguen en la explotación y mantenimiento del conjunto de una red semaforizada centralizada, supervisada y gestionada. Por ejemplo, una mayor agilidad en el control y reparación de averías, no sólo disminuye los costes, sino que aumenta además la eficacia del servicio.
- Disminución del consumo de combustible, al poderse contabilizar sensibles decrementos, tanto en la duración de los viajes como en la frecuencia de las detenciones. Cálculos teóricos parecen indicar que el referido ahorro puede alcanzar niveles cercanos al 10%, sobre todo, de la situación original de partida.
Planes de tráfico
|
El concepto clásico de Plan de Tráfico que se maneja en un sistema de regulación centralizada, está referido a la definición de las siguientes variables o parámetros:
El Ciclo en el interior de un área o subárea, estructura y reparto de cada cruce o intersección urbana y desfases entre las sucesivas intersecciones de un itinerario o ruta. Partiendo de unos modelos matemáticos, para la representación de los movimientos del tráfico, y mediante la aplicación de algoritmos de optimización a determinadas funciones de coste, se obtiene el valor de aquellos parámetros para los distintos planes de tráfico. Estos cálculos se realizaban originalmente en línea, generando constantemente planes en tiempo real, o bien fuera de línea, elaborando bibliotecas de planes precalculados que eran posteriormente seleccionados y aplicados por el ordenador central.
|
En la actualidad, se tiende a sistemas mixtos adaptativos que se elaboran previamente a partir de datos históricos y que son continuamente corregidos y adaptados, en cada situación del tráfico, por el propio sistema.
|
 Intersección en T con multidireccionamiento peatonal
Intersección en T con multidireccionamiento peatonal
Los planes fijos, al ser elaborados fuera de línea, pueden ser estudiados y comprobados con rigurosidad y detalle. Pero se transforman en planes dinámicos, cuando el sistema introduce correcciones y adaptaciones basadas en los datos de tráfico que recibe en tiempo real, en sucesivos períodos de integración.
Cada vez con mayor frecuencia, se realizan unos controles continuados de la eficacia del sistema, utilizando herramientas de evaluación (métodos estadísticos o modelos de simulación) con el fin de cuantificar las ventajas obtenidas o las potenciales que se obtendrían con nuevas inversiones.
La estructura y el reparto de la intersección, viene definido por el número movimientos necesarios para la resolución de las combinaciones que se desean ofertar en la regulación.
Cada vez con mayor frecuencia, se realizan unos controles continuados de la eficacia del sistema, utilizando herramientas de evaluación (métodos estadísticos o modelos de simulación) con el fin de cuantificar las ventajas obtenidas o las potenciales que se obtendrían con nuevas inversiones.
La estructura y el reparto de la intersección, viene definido por el número movimientos necesarios para la resolución de las combinaciones que se desean ofertar en la regulación.
Los criterios son los siguientes:
- El número de movimientos programados deben ser los menores posibles, ya que esto minimiza los tiempos de despeje necesarios para pasar de un movimiento a otro.
- Dentro de cada movimiento, en cambio, el número de trayectos simultáneos que no tengan conflicto entre sí debe ser máximo.
- El recorrido dentro de la intersección, deberá ser lo más corto posible, y este criterio debe ser tenido en cuenta en la construcción de la propia intersección.
- La ordenación de los movimientos, puede llegar a ser clave, para la utilización de los tiempos de despeje, y debe ser proyectada con cautela.
- Los movimientos peatonales pueden ser simultaneados con determinados movimientos del tráfico rodado. En este caso, se debe tener en cuenta la intensidad peatonal, que debe ser baja o media, la intensidad del tráfico rodado, que deben mantenerse en niveles similares y el trayecto de estos, que en ningún caso debe permitir la aceleración de los vehículos.
El ciclo de trabajo, debe estar comprendido entre los 35 segundos en su límite inferior y 120 en su límite superior. Estos márgenes, han sido comprobados, en la vida real y establecen una duración comprensible para la psicología del conductor medio.
Normalmente, en la trama urbana, la cercanía de las intersecciones, impone el uso de un ciclo igual para todas ellas, ante la necesidad de coordinar los tiempos de paso de las intersecciones que condicionan un viario, sobre las necesidades de uso que esta intersección necesite para dar solución a sus movimientos.
La longitud del ciclo de trabajo, debe estar equilibrada entre la menor cantidad de ciclos por hora, para reducir en lo posible el número de arrancadas de vehículos, más lento que el tránsito de los mismos, y la utilización de los ciclos más cortos posibles, para reducir al máximo los tiempos de espera.
Al contrario que los movimientos del tráfico rodado, cuyo tiempo mínimo de paso puede llegar a ser muy reducido, los movimientos para los peatones están condicionados por la anchura del viario y la legislación. De este modo, si un movimiento simultáneo de peatones y tráfico rodado, no tiene suficiente amplitud de segundos para los primeros, la programación debe ser reformada de manera obligatoria hasta que cubra la necesidad de paso de éstos.
Normalmente, en la trama urbana, la cercanía de las intersecciones, impone el uso de un ciclo igual para todas ellas, ante la necesidad de coordinar los tiempos de paso de las intersecciones que condicionan un viario, sobre las necesidades de uso que esta intersección necesite para dar solución a sus movimientos.
La longitud del ciclo de trabajo, debe estar equilibrada entre la menor cantidad de ciclos por hora, para reducir en lo posible el número de arrancadas de vehículos, más lento que el tránsito de los mismos, y la utilización de los ciclos más cortos posibles, para reducir al máximo los tiempos de espera.
Al contrario que los movimientos del tráfico rodado, cuyo tiempo mínimo de paso puede llegar a ser muy reducido, los movimientos para los peatones están condicionados por la anchura del viario y la legislación. De este modo, si un movimiento simultáneo de peatones y tráfico rodado, no tiene suficiente amplitud de segundos para los primeros, la programación debe ser reformada de manera obligatoria hasta que cubra la necesidad de paso de éstos.
Sincronización sin paradas
El funcionamiento de una serie de semáforos consecutivos, en el viario de trabajo, se representa tradicionalmente por medio de un diagrama de espacio-tiempo, quedando en el eje X, la distancia a recorrer entre semáforos, y en el eje Y, una escala de tiempo. Sobre la distancia de cada semáforo, se dibuja el tiempo de rojo y verde que tiene dicho semáforo en su intersección. La trayectoria de un vehículo que avanza con velocidad constante estará representada por una línea recta, cuya inclinación varía con la velocidad del trayecto.
Para clarificar la representación, se suele representar una línea con la trayectoria del primer vehículo, en el primer segundo de verde del primer semáforo del recorrido; una segunda línea representará el último vehículo que pueda rebasar todos los semáforos coordinados sin necesidad de detenerse. La franja situada entre ambas líneas se denomina onda verde. El objetivo, es que esta franja, sea lo más amplia posible. Dado un ciclo y una velocidad, no es en principio difícil conseguir una banda de progresión satisfactoria en una vía de único sentido. Los problemas se inician, cuando se quieren hacer simultáneamente ondas verdes para viarios de doble sentido, cuando alguna intersección de las que forma este recorrido interactua con otra onda verde, o cuando dos ondas verdes están a su vez condicionadas por una tercera.
Para clarificar la representación, se suele representar una línea con la trayectoria del primer vehículo, en el primer segundo de verde del primer semáforo del recorrido; una segunda línea representará el último vehículo que pueda rebasar todos los semáforos coordinados sin necesidad de detenerse. La franja situada entre ambas líneas se denomina onda verde. El objetivo, es que esta franja, sea lo más amplia posible. Dado un ciclo y una velocidad, no es en principio difícil conseguir una banda de progresión satisfactoria en una vía de único sentido. Los problemas se inician, cuando se quieren hacer simultáneamente ondas verdes para viarios de doble sentido, cuando alguna intersección de las que forma este recorrido interactua con otra onda verde, o cuando dos ondas verdes están a su vez condicionadas por una tercera.
|
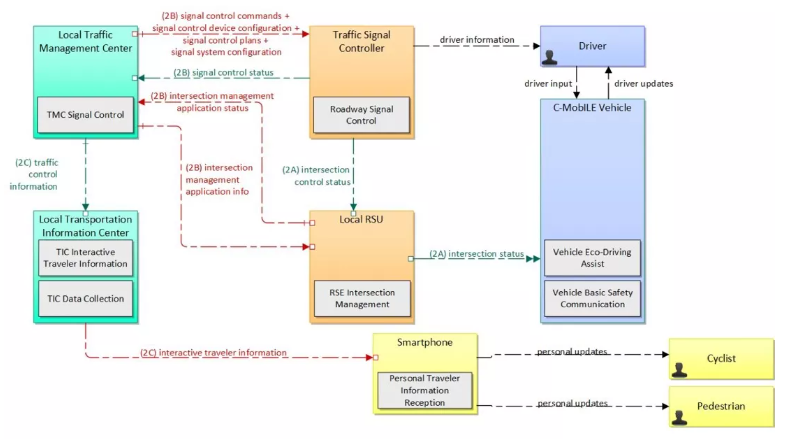
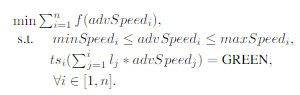
(2012) La evolución de este modelo de trabajo tiene como último recurso el denominado Asistente de velocidad ideal de paso de semáforos en verde (Green Light Optimal Speed Advisory). Esta tecnología permite aconsejar al conductor de la velocidad ideal para maximizar su paso por una ruta prediseñada.
Esta información debe transmitirse desde un servidor, a los dispositivos de información personal de los conductores, dentro del área de relevancia y en coincidencia con una sección de carretera específica o un carril específico, si la fase del semáforo proporcionada y el tiempo son específicos para ese carril. Dentro del dispositivo de información personal, se calculan los perfiles de velocidad óptimos, y se muestran al conductor. |
Dado que los vehículos viajan dentro del entorno urbano en pelotones, la efectividad de un sistema depende en gran medida de identificar correctamente el vehículo líder, el primero en recibir consejos de trayectoria para cada ciclo, mientras los vehículos forman, de modo natural, un pelotón detrás de este vehículo líder. Esto mejora la compactación (densidad del grupo de trabajo), y optimiza los tiempos de verde asignados para la trayectoria.
Un modelo de bucle de tiempo permite una identificación precisa del líder incluso cuando existen interacciones complejas entre los vehículos anteriores. Los algoritmos son ideales para entornos de vehículos autónomos conectados, porque el control por computadora permite gestionar las trayectorias de los vehículos con mayor precisión y facilidad, pero los algoritmos de asesoramiento también se pueden utilizar, siempre que esté disponible la comunicación entre el vehículo y la infraestructura. |

|
Como se ha mencionado anteriormente, en la trama urbana, la cercanía de las intersecciones, hace necesario igualar el ciclo para todas ellas. Esto se debe a la coordinación, que implica la existencia de una relación, que se mantiene a lo largo del tiempo, entre funcionamiento de una intersección y otra. El sistema más simple de coordinación, es el llamado y definido como simultáneo. Este consiste en que todos los semáforos a lo largo de la calle muestren siempre la misma indicación, y llegando, en condiciones de máxima intensidad, a la apertura y cierre de todos los semáforos que condicionan el viario de modo simultáneo. El objetivo último, de este tipo de funcionamiento, es el avance de los paquetes de tráfico a saltos a lo largo de la calle, lo que evita el bloqueo de las intersecciones.
Por tanto, el modelo de coordinación está condicionado por la intensidad de la trayectoria, llegando, en su modo más extremo, al denominado como sistema Manhattan, que tiene su origen en esta ciudad. Ofrece un pobre recorrido, pero permite avanzar al paquete de tráfico en situaciones de muy alta intensidad que de otro modo provocarían el colapso del viario. Este modo de trabajo, sólo es utilizado en estructuras urbanas de cuadrícula rectangular, el típico modelado en las ciudades americanas.
En el modelo urbano europeo, la trama suele ser mucho más irregular y por tanto, la coordinación suele estar conformada por un sistema alterno. Este modelo de trabajo, está determinado por las distancias regulares entre intersecciones, a la vez que las velocidades de paso suelen ser diversas y difíciles de cuantificar. En este tipo de escenarios, la apertura de los semáforos, y a ser posible normalmente su cierre, se realiza siguiendo un ritmo que permite el avance continuo a una velocidad constante del paquete de tráfico regulado. Este modelo de trabajo, se denomina como sistema progresivo y es el más usado en España.
Por tanto, el modelo de coordinación está condicionado por la intensidad de la trayectoria, llegando, en su modo más extremo, al denominado como sistema Manhattan, que tiene su origen en esta ciudad. Ofrece un pobre recorrido, pero permite avanzar al paquete de tráfico en situaciones de muy alta intensidad que de otro modo provocarían el colapso del viario. Este modo de trabajo, sólo es utilizado en estructuras urbanas de cuadrícula rectangular, el típico modelado en las ciudades americanas.
En el modelo urbano europeo, la trama suele ser mucho más irregular y por tanto, la coordinación suele estar conformada por un sistema alterno. Este modelo de trabajo, está determinado por las distancias regulares entre intersecciones, a la vez que las velocidades de paso suelen ser diversas y difíciles de cuantificar. En este tipo de escenarios, la apertura de los semáforos, y a ser posible normalmente su cierre, se realiza siguiendo un ritmo que permite el avance continuo a una velocidad constante del paquete de tráfico regulado. Este modelo de trabajo, se denomina como sistema progresivo y es el más usado en España.
En la trama urbana, las coordinaciones son dependientes de otras, y obligan a perder grados de libertad en la coordinación. Para abordar este problema, el criterio debe basarse en la jerarquización de prioridades de cada uno de ellos. Esta coordinación prioritaria, no se tiene que ajustar a lo largo de recorridos completos, sino que se pueden utilizar itinerarios que combinen dos o más viarios de modo total o parcial.
En la coordinación de mallas coordinables, algunas veces se prefiere repartir las desventajas de una mala progresión entre varios tramos, a tener una progresión perfecta en determinados tramos, mientras que en otros no existen unas condiciones mínimas de esa progresión.
En la coordinación de mallas coordinables, algunas veces se prefiere repartir las desventajas de una mala progresión entre varios tramos, a tener una progresión perfecta en determinados tramos, mientras que en otros no existen unas condiciones mínimas de esa progresión.
Con la coordinación, se puede conseguir un objetivo secundario, como es el control de la velocidad de paso de los vehículos por el viario tratado, de modo que se puede contener en términos de seguridad vial, la posibilidad de una siniestralidad más agravante en función de un aumento desmesurado de la velocidad.
Una de las posibilidades para ejecutar esta misión, una vez establecida la coordinación del viario, es reducir el ciclo de todos los semáforos, lo que aumentará la velocidad media de paso o aumentar el tiempo de ciclo, lo que moderará la velocidad media.
Una de las posibilidades para ejecutar esta misión, una vez establecida la coordinación del viario, es reducir el ciclo de todos los semáforos, lo que aumentará la velocidad media de paso o aumentar el tiempo de ciclo, lo que moderará la velocidad media.
Como ya se ha mencionado anteriormente, a no ser que la distancia entre intersecciones sea constante y los viarios unidireccionales, será muy difícil llegar a conseguir que todos los puntos del diagrama estén alineados. La consecuencia es que los cálculos teóricos, deben ser reajustados una vez aplicados en el viario de trabajo. Otro de los factores discordantes con los trabajos de estudio, es el tráfico que se incorpora desde las vías transversales y que condiciona, en función de su posición y velocidad al resto de la onda verde. Una forma de mitigar este efecto, siempre sobre la mesa de trabajo, es alinear la línea del primer vehículo que llega a la intersección en el primer segundo de verde donde se produce la interacción, independientemente de su origen. De este modo, se amortiza los tiempos de arranque de los vehículos que ahora forman la cabeza del paquete de tráfico tratado, hasta que su velocidad media sea homogénea con el resto de tráfico.
En la práctica, este escenario es altamente variable y por lo tanto no puede ser manejado por una actuación que en su propia propuesta es rígida. La conclusión de todo lo anterior es que, incluso en calles de sentido único, y sobre todo con las distancias medias de las intersecciones españolas, se hace muy difícil obtener una progresión perfecta a partir de ciertas intensidades de tráfico, que no tienen por qué ser altas.
Este es un factor que minusvalora el trabajo de las intersecciones en tiempos fijos y con desfases y coordinaciones rígidas, en favor de sistemas semiactuados, que manteniendo una coordinación básica entre intersecciones, ofrece un rango de verde demandado por los propios vehículos, y el origen del nacimiento de los sistemas plenamente adaptativos a las condiciones de tráfico leído desde la propia trama urbana en tiempo real.
En la práctica, este escenario es altamente variable y por lo tanto no puede ser manejado por una actuación que en su propia propuesta es rígida. La conclusión de todo lo anterior es que, incluso en calles de sentido único, y sobre todo con las distancias medias de las intersecciones españolas, se hace muy difícil obtener una progresión perfecta a partir de ciertas intensidades de tráfico, que no tienen por qué ser altas.
Este es un factor que minusvalora el trabajo de las intersecciones en tiempos fijos y con desfases y coordinaciones rígidas, en favor de sistemas semiactuados, que manteniendo una coordinación básica entre intersecciones, ofrece un rango de verde demandado por los propios vehículos, y el origen del nacimiento de los sistemas plenamente adaptativos a las condiciones de tráfico leído desde la propia trama urbana en tiempo real.
Bajo los términos de la dinámica de fluidos, utilizados como se ha mencionado anteriormente, en los cálculos de capacidad de los viarios, las ondas verdes obtienen el mejor de sus parámetros, en la peor intersección del conjunto, que se denomina intersección crítica, que suele tener como característica que las bandas de progresión no se superponen, de forma que prácticamente ocupan todo el tiempo disponible, ya que cuando no están pasando vehículos en un sentido lo están haciendo en el contrario.
En algunas ciudades europeas, y en muchas de las norteamericanas, junto a cada uno de los semáforos que conforman la onda verde, se instalan unas señales alfanuméricas que indican en tiempo real, la velocidad a la que el conductor debe recorrer el tramo señalizado para mantenerse en incrustado en la onda verde, lo que permite utilizar al propio conductor para gestionar y mejorar el modelado de la onda verde.
Saturación y congestión
La congestión aparece, cuando un número excesivo de vehículos desea hacer uso de un espacio tan escaso como el viario urbano y superan su capacidad, haciendo imposible una utilización racional del mismo. Cuando en un punto de la red viaria, el volumen de circulación o demanda alcanza la capacidad máxima u oferta, surge la saturación. Si esta situación crítica se prolonga, los vehículos bloquean progresivamente las intersecciones anteriores y sus accesos transversales. Al aparecer y extenderse los bloqueos, puede asegurarse que se ha alcanzado la congestión. Y mientras la demanda siga siendo superior a la oferta, una oferta que por otra parte queda reducida por la propia situación congestiva, el fenómeno se autoalimenta y extiende rápidamente.
|
Un sistema centralizado debe considerar preferentemente los puntos críticos, en los que existe mayor probabilidad de congestión, intentando evitar su aparición, o al menos limitar su extensión en el espacio y duración en el tiempo, con el fin de minimizar las pérdidas de capacidad y los elevados costes comunitarios que este fenómeno genera. Ante la imposibilidad de dar definiciones exactas, se admite que un punto de la malla urbana ha alcanzado la saturación, cuando cualquier empeoramiento, por pequeño que sea, en las condiciones del tráfico, o bien ante un ligero incremento del volumen del mismo, hace caer rápidamente el nivel de servicio teórico previsto, así como la velocidad media de circulación. En ese momento comienza un estado de progresiva congestión, que puede identificarse en un acceso a una intersección urbana semaforizada, cuando el número total de vehículos que se encuentran detenidos ante una fase roja, no pueden atravesar la citada intersección durante la fase verde que corresponde al mismo ciclo. Cuando posteriormente remite la demanda, la recuperación es mucho más lenta que el proceso degenerativo anterior. |
Equipos e instalaciones
 Descontador de tiempo de paso en verde
Descontador de tiempo de paso en verde
Es evidente que, para conseguir el máximo rendimiento de una red viaria urbana, su gestión debe integrar sistemas de control centralizado en tiempo real. En concreto, para implementar una regulación centralizada del tráfico, se necesitan los siguientes instrumentos:
Sin embargo, se seguirán instalando todavía, durante bastante tiempo, los elementos más usuales en la actualidad: detectores electrónicos con espira de inducción electromagnética.
Todos estos equipos, basados en la tecnología de los microprocesadores, han sido perfeccionados hasta alcanzar altas cotas de seguridad en su funcionamiento interno, e incorporan programas de validación de parámetros y protección contra errores en su programación o manipulación. El Software es normalmente modular, sencillo y muy flexible.
Los ordenadores del Centro de Gestión de Tráfico Urbano, son de elevados rendimientos en sus capacidades operacionales, incluso en tiempo real. Hoy se prefiere colocar una red local de varios ordenadores, relativamente pequeños, interconectados entre sí, con el fin de seccionar áreas urbanas y modular las programaciones. Se favorecen así futuras ampliaciones, y se posibilita una completa distribución de tareas en el caso de averías parciales.
Se utilizan numerosos equipos periféricos, fundamentalmente paneles sinópticos, pantallas gráficas y plotters y, por supuesto, las clásicas impresoras y pantallas.
Las redes de comunicaciones constituyen una malla básica, e incorporan conexiones de cámaras del circuito cerrado de video, paneles de información al usuario y otros subsistemas, dentro de un sistema general de control centralizado del tráfico.
- Información y datos sobre las distintas evoluciones del tráfico.
- Modelos matemáticos para su representación.
- Algoritmos de optimización.
- Equipos e infraestructura de aplicación.
Sin embargo, se seguirán instalando todavía, durante bastante tiempo, los elementos más usuales en la actualidad: detectores electrónicos con espira de inducción electromagnética.
Todos estos equipos, basados en la tecnología de los microprocesadores, han sido perfeccionados hasta alcanzar altas cotas de seguridad en su funcionamiento interno, e incorporan programas de validación de parámetros y protección contra errores en su programación o manipulación. El Software es normalmente modular, sencillo y muy flexible.
Los ordenadores del Centro de Gestión de Tráfico Urbano, son de elevados rendimientos en sus capacidades operacionales, incluso en tiempo real. Hoy se prefiere colocar una red local de varios ordenadores, relativamente pequeños, interconectados entre sí, con el fin de seccionar áreas urbanas y modular las programaciones. Se favorecen así futuras ampliaciones, y se posibilita una completa distribución de tareas en el caso de averías parciales.
Se utilizan numerosos equipos periféricos, fundamentalmente paneles sinópticos, pantallas gráficas y plotters y, por supuesto, las clásicas impresoras y pantallas.
Las redes de comunicaciones constituyen una malla básica, e incorporan conexiones de cámaras del circuito cerrado de video, paneles de información al usuario y otros subsistemas, dentro de un sistema general de control centralizado del tráfico.
Evolución

|
Durante la última década han proliferado numerosos sistemas informatizados (regulación, control de accesos, autobuses, aparcamientos, etc.), que coexisten dentro de una misma área urbana, explotando aisladamente desde distintos Centros de Gestión. Una máxima eficacia de la explotación del tráfico en todo su conjunto dependerá de actuaciones integradoras entre aquellos sistemas.
Inicialmente, los sistemas de regulación centralizada partían de unos datos previos de ciclos y repartos, y se concentraban en el cálculo de desfases. En metodologías más avanzadas, se acometieron cálculos para la optimización conjunta de todas las variables. Las técnicas aplicadas se basaban en la maximización de anchura de bandas y criterios de minimización de funciones de coste que incluyen demoras, número de paradas y consumo de carburante. |
|
El modelo más conocido en sus orígenes fue el TRANSYT, desarrollado por el TRRL del Reino Unido del que existen varias versiones. El TRANSYT 8, introdujo como novedad el tratamiento de colas y de los flujos del transporte público. Rápidamente aparecieron programas elaborados a partir del TRANSYT, como el SIGOP en Estados Unidos y el THEBES francés. Los cálculos en estos modelos se realizan siempre fuera de línea, a partir de datos históricos.
De acuerdo con la evolución de los criterios utilizados, puede hablarse de una primera generación de sistemas de control, basados en un conjunto de planes de tráfico precalculados, a partir de datos históricos, que se aplican según métodos horarios o manualmente, a través de operador, en intervalos aproximados de 15 minutos. En ocasiones se han combinado con estrategias adaptativas, aplicadas a intersecciones especialmente críticas. El CITRAC, utilizado en Glasgow, pertenece a este grupo. |
Posteriormente, aparecieron sistemas de control que calculan e implementan en tiempo real los distintos planes de tráfico. Utilizan algoritmos de predicción, apoyados tanto en datos históricos como en los obtenidos en intervalos inmediatamente anteriores, intentando así adelantarse a las evoluciones del tráfico y sus consiguientes volúmenes. El ASCOT, desarrollado en Estados Unidos, a partir de 1977, establece un conjunto de planes calculados con la ayuda de lógicas de predicción, para realizar a continuación un ajuste dinámico de repartos en tiempo real. Por último, trata de manera especial e independiente aquellos puntos en los que se detecta congestión, mediante un indicador de longitudes de colas. No tardaron en surgir estrategias que, a partir de planes precalculados, realizan optimizaciones "en línea", reaccionando inmediatamente a la situación del tráfico en cada momento. Con frecuencia utilizan, así mismo, métodos de predicción. Es el momento, año 1981, en que el SCOOT, uno de los más conocidos, se desarrolla por el TRRL, experimentándolo en Glasgow y en Coventry, con resultados francamente superiores a los conseguidos con el TRANSYT. El SCOOT actúa minimizando una función de demoras y paradas. Mide continuamente los flujos de toda la red, y establece frecuentes aunque pequeñas modificaciones de repartos, desfases y ciclos. Su adaptación a las variaciones de la demanda en tiempo real, es muy rápida, y ha podido comprobarse que su máxima eficacia se alcanza en condiciones de tráfico medio o medio-alto. Su principal carácter distintivo es la utilización, en línea, de un modelo de tráfico que mantiene, en tiempo real, un estimador de colas en todas las vías del área.
|
El SCAT es un modelo experimentado en Sydney, semejante al SCOOT británico, pero que utiliza un sistema mixto, en línea y fuera de línea, de adaptación al tráfico. Ambos sistemas, no obstante, han ido abandonando progresivamente las técnicas de predicción.
En otros países se han elaborado sistemas de control, a partir de experiencias concretas, como el PRODYN y ZELT franceses, el VERO alemán, etc. Actualmente, están apareciendo modelos por asignación iterativa de flujos, que tienen en cuenta que las vías que escogen los vehículos en el interior de una malla urbana, pueden ser alteradas por el propio funcionamiento de un sistema de regulación centralizada. Estos modelos constan fundamentalmente de dos fases, una de asignación y otra de simulación, hasta conseguir la convergencia del proceso. A este tipo pertenece el CONTRAM (Sistema de asignación de Tráfico y modelización de colas) del TRRL (1978) Y el SATURN de la Universidad de Leeds (1980) que incluye un tratamiento específico de las matrices Origen Destino. |
Conclusiones

Las técnicas para la regulación centralizada del tráfico, han hecho su aparición muy recientemente, hace 20-25 años (2000). Su evolución y progreso, en cuanto a equipos soporte, así como metodologías de cálculo, es continuo y constante, caminando hacia futuros sistemas integrados para la explotación global de las redes viarias urbanas y semiurbanas.
El control de semáforos en tiempo real, va a alcanzar rápidamente su techo de eficacia. Las estrategias de desviación o regulación de itinerarios, surgirán con el objeto de aprovechar más racionalmente las capacidades de oportunidad de determinadas rutas urbanas privilegiadas (corredores) y sus alternativas. La coordinación entre ambas regulaciones (semafórica e itinerarios) deberá ser muy intensa. Lo mismo puede afirmarse acerca de las regulaciones del tráfico en la ciudad y sus accesos.
Es muy probable que, durante varios decenios, seguirán aplicándose los métodos convencionales, si bien con nuevos equipos soporte por el imparable desarrollo de la microelectrónica. Los sistemas semafóricos centralizados, el control de accesos urbanos y los paneles y señales de mensajes variables continuarán apareciendo en las grandes urbes.
Existe una necesidad evidente de mejorar la calidad de los datos de tráfico, como elemento soporte de cualquier aplicación teórica, así como de promover la puesta a punto y uso de metodologías de evaluación, fundamentales a la hora de intentar cuantificar los auténticos beneficios introducidos en la explotación viaria.
Las investigaciones van a seguir en el terreno de la modelización y la previsión del tráfico, en la definición de estrategias de regulación y en la elaboración de herramientas de ayuda a la explotación. Técnicas como la simulación en tiempo real o la inteligencia artificial (sistemas expertos) aparecen como muy prometedoras. Podrán ejecutar selección automática o dinámica de planes de tráfico precalculados, e incluso generación dinámica de los mismos mediante cálculo directo de parámetros en tiempo real, si bien es probable que tengan que ser apoyados por algunos de los sistemas adaptativos existentes, en conjunción con ellos.
El control de semáforos en tiempo real, va a alcanzar rápidamente su techo de eficacia. Las estrategias de desviación o regulación de itinerarios, surgirán con el objeto de aprovechar más racionalmente las capacidades de oportunidad de determinadas rutas urbanas privilegiadas (corredores) y sus alternativas. La coordinación entre ambas regulaciones (semafórica e itinerarios) deberá ser muy intensa. Lo mismo puede afirmarse acerca de las regulaciones del tráfico en la ciudad y sus accesos.
Es muy probable que, durante varios decenios, seguirán aplicándose los métodos convencionales, si bien con nuevos equipos soporte por el imparable desarrollo de la microelectrónica. Los sistemas semafóricos centralizados, el control de accesos urbanos y los paneles y señales de mensajes variables continuarán apareciendo en las grandes urbes.
Existe una necesidad evidente de mejorar la calidad de los datos de tráfico, como elemento soporte de cualquier aplicación teórica, así como de promover la puesta a punto y uso de metodologías de evaluación, fundamentales a la hora de intentar cuantificar los auténticos beneficios introducidos en la explotación viaria.
Las investigaciones van a seguir en el terreno de la modelización y la previsión del tráfico, en la definición de estrategias de regulación y en la elaboración de herramientas de ayuda a la explotación. Técnicas como la simulación en tiempo real o la inteligencia artificial (sistemas expertos) aparecen como muy prometedoras. Podrán ejecutar selección automática o dinámica de planes de tráfico precalculados, e incluso generación dinámica de los mismos mediante cálculo directo de parámetros en tiempo real, si bien es probable que tengan que ser apoyados por algunos de los sistemas adaptativos existentes, en conjunción con ellos.
